The quest to create machines that can replicate human and animal movement has been a focus of inventors and researchers for nearly seven decades. Over this extensive period, robots have predominantly relied on motors for movement—an innovation that has been around for over two centuries. This reliance has led to a limitation in the mobility and adaptability of robots, making them comparatively inept when juxtaposed against living beings. Conventional walking robots, equipped with motorized legs, are strikingly different in their movement capabilities and energy efficiency from their biological counterparts.
As robotics continues to evolve, it is increasingly clear that motors impose significant constraints on the potential of robotic systems. These systems often struggle with energy consumption and responsiveness, thereby highlighting the urgent need for a more sophisticated approach to robotic design—one that draws inspiration from the musculoskeletal systems found in biological organisms.
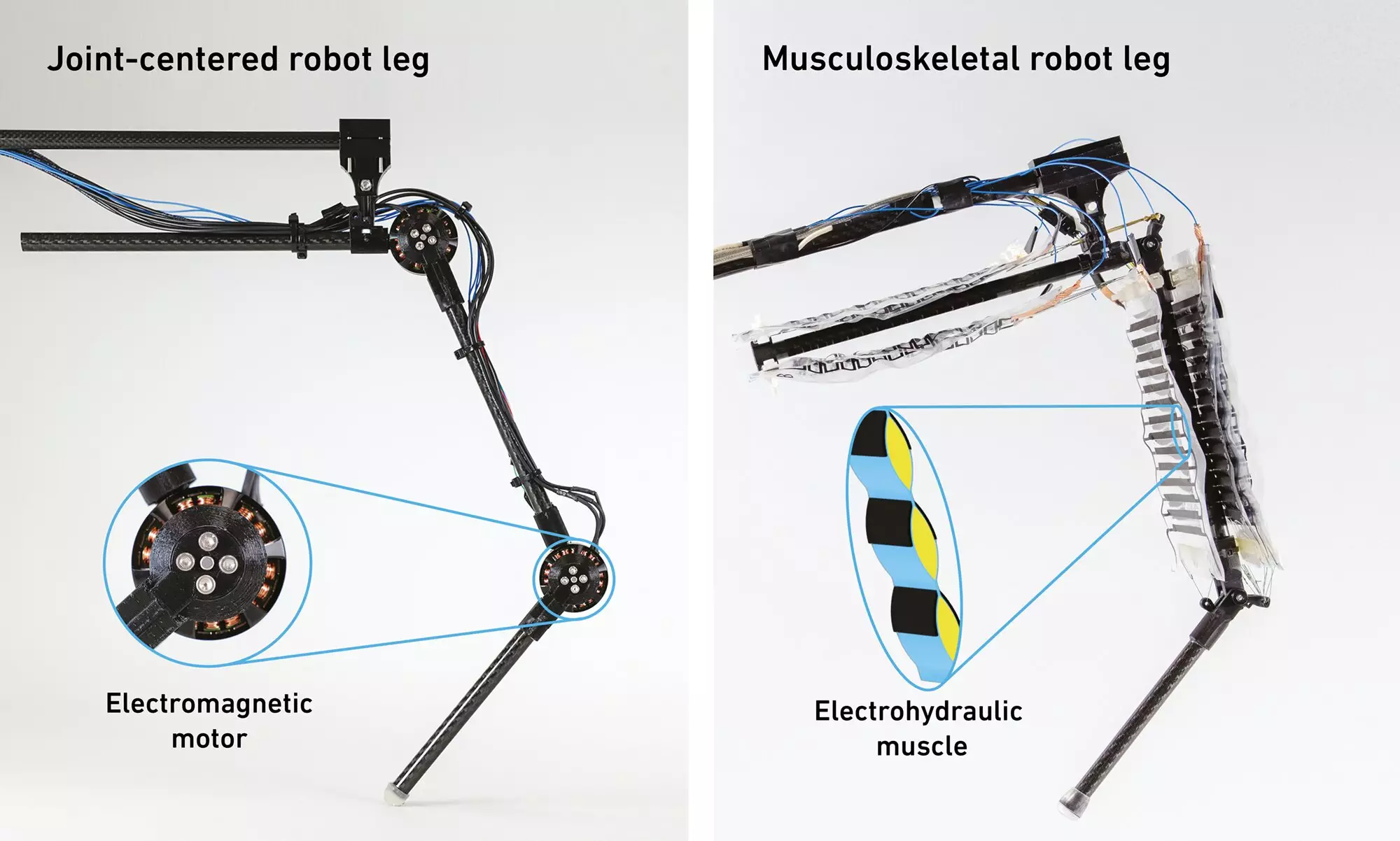
Recent research spearheaded by teams at ETH Zurich and the Max Planck Institute for Intelligent Systems introduces a transformative concept: muscle-powered robotic legs. Through the collaboration known as the Max Planck ETH Center for Learning Systems (CLS), researchers have developed an innovative system that employs electro-hydraulic actuators—dubbed HASELs—to power robotic movements efficiently and effectively. This paradigm shift provides insight into how future robotic systems might function, emphasizing adaptability and energy efficiency in ways that conventional motor-driven designs cannot.
The concept of using artificial muscles to simulate the function of human and animal muscles is groundbreaking. These actuators operate using principles of electrostatics, manipulating oil within plastic bags to create movement. The result is a robotic leg that can perform dynamic actions such as high jumps and rapid movements without needing excessive external sensors. This characteristic mirrors the innate capabilities of living creatures, showcasing the potential of biomimicry in robotics.
One of the hallmarks of the new muscle-powered leg is its superior energy efficiency compared to traditional electric motor-driven designs. Specific experiments demonstrate that while electric motors typically waste energy—transforming it into heat—the electro-hydraulic system maintains a stable temperature, thereby reducing the need for additional cooling mechanisms. This efficiency not only contributes to better performance but also significantly simplifies the design of robotic systems, which commonly require complex heat management solutions.
As researchers have noted, traditional robotics often grapple with energy losses, resulting in inefficient operations. The newly designed muscle actuators, by contrast, utilize static electricity to minimize wasted energy. This innovation opens the door to a future where robots can operate longer on less energy, an essential aspect for applications in remote or limited power environments.
Compared to electric motors that depend on continuous sensor feedback for operational efficiency, the new muscle-powered approach emphasizes adaptability as a critical feature. The robotic leg operates using only two basic input signals—one for bending and one for extending—allowing for a kind of intuitive autonomy akin to that found in biological entities. This characteristic enables the robotic leg to instinctively adjust its movements according to the terrain, offering a more fluid and natural interaction with its environment.
The significance of this development cannot be overstated. By reflecting how living organisms navigate varied surfaces without conscious effort, this technology paves the way for robots capable of traversing diverse and unpredictable environments. The fundamental concept is simple yet powerful: adaptability in movement is essential for effective locomotion, particularly in dynamic settings.
Despite the promising developments in muscle-powered robotics, challenges remain. Currently, the system’s mobility is restricted; it is tethered to a rod and cannot yet execute free movements autonomously. Researchers acknowledge that more work is needed to refine these systems before they can emulate the full spectrum of movement seen in living organisms.
Looking forward, there is a sense of optimism among researchers that advancing this technology will lead to significant breakthroughs in robotic capabilities. The ongoing exploration of artificial muscles could hold revolutionary implications not only for lightweight robotics but also for industries such as manufacturing and healthcare, where robotic dexterity and adaptability are critical.
The advent of muscle-powered robotic systems represents a watershed moment in the field of robotics. By learning from nature’s own designs and developing technology that mimics biological functions, researchers are laying the foundation for a new generation of robots that are more efficient, adaptable, and autonomous. As the field progresses, we may well witness the emergence of robots that can navigate real-world challenges with the same ease and fluidity as the creatures they seek to emulate. The integration of artificial muscle technology has the potential to redefine the boundaries of what robots can achieve, offering a glimpse into a future rich with possibilities.