Unmanned Aerial Vehicles (UAVs), commonly referred to as drones, have drastically transformed various industries by enhancing the efficiency and capability of environmental monitoring and exploration. These flying robots excel not only in gathering aerial footage but also in generating intricate maps and three-dimensional (3D) models of diverse terrains. A notable development in this field is SOAR, a system designed by researchers at Sun Yat-Sen University and the Hong Kong University of Science and Technology. SOAR empowers a collective of UAVs to autonomously explore and capture photographic data of environments, thereby facilitating rapid and precise reconstruction of those areas.
This innovative system represents a significant advancement in UAV technology and is set to be showcased at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024. As the demand for high-quality and efficient 3D reconstruction escalates, systems like SOAR are essential for bridging existing gaps in UAV capabilities.
According to Mingjie Zhang, one of the key contributors to the study, the genesis of the SOAR system is rooted in the recognition that current methodologies for 3D reconstruction typically fall into two categories: model-based and model-free approaches. The former often requires costly prior information and extensive time investment, while the latter may struggle with local planning constraints when attempting simultaneous exploration and reconstruction. SOAR aims to leverage the strengths of both paradigms through a heterogeneous multi-UAV system.
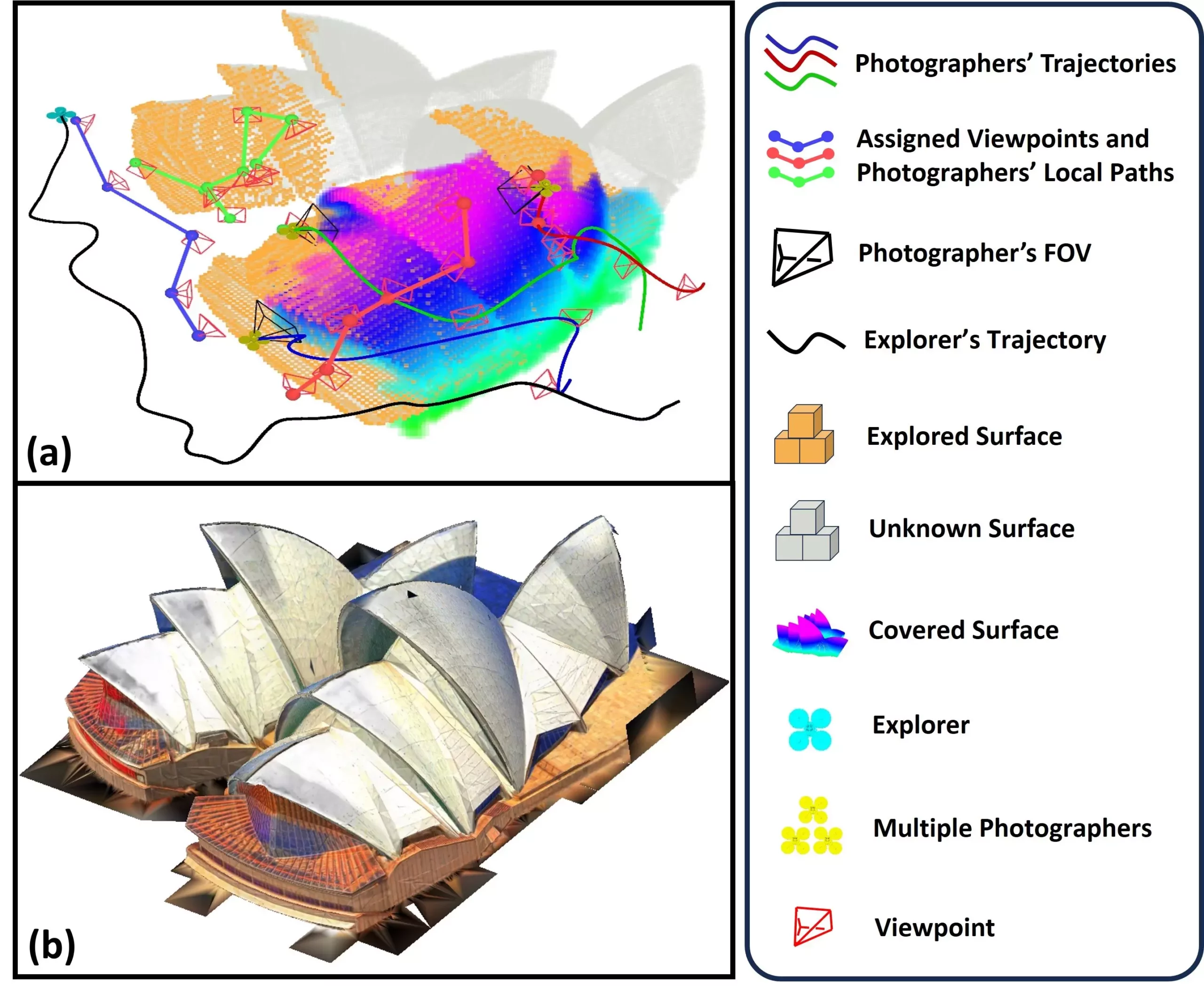
The dual operation of an “explorer” UAV equipped with LiDAR technology, alongside multiple “photographer” UAVs fitted with high-resolution cameras, allows for a comprehensive data collection strategy. This clever arrangement is engineered for the efficient mapping of environments while ensuring that high-quality visual data is gathered for effective 3D reconstruction.
The process of 3D reconstruction in the SOAR system involves several intricately designed steps. Initially, the explorer UAV conducts exploratory navigation, efficiently mapping environments with a surface frontier-based strategy. As it acquires information about the landscape, the system simultaneously generates incremental viewpoints for thorough coverage of the mapped area. Subsequently, photographer UAVs are assigned these viewpoints to gather visual data, ensuring a collaborative approach that maximizes efficiency and accuracy.
One of the standout features of SOAR is its adaptive data collection, utilizing both LiDAR and visual sensors. This multifaceted approach enables the system not only to explore landscapes effectively but also to generate high-fidelity reconstructions that are crucial for various applications ranging from urban planning to video game design.
Testing conducted through a series of simulations indicated that SOAR outperformed several leading methods in the realm of environment reconstruction. Zhang highlighted that one of the primary achievements of their research was the establishment of a framework that integrates key algorithms through an incremental design. This innovative framework balances real-time operational capabilities and overall system efficiency, an essential trait needed for online and dynamic reconstruction tasks.
As we look to the future, SOAR’s potential applications are vast. It could revolutionize urban modeling, assisting city planners in crafting detailed models of urban infrastructure. Additionally, it presents significant benefits for cultural heritage preservation, allowing historians to reconstruct and digitally archive historical sites and artifacts. In disaster response scenarios, SOAR could facilitate rapid assessments of damage, supporting rescue and recovery missions when time is of the essence.
Future Directions and Enhancements
Looking ahead, researchers plan to refine SOAR to tackle real-world challenges like localization errors and communication disruptions, which frequently occur when transitioning from simulated environments to actual deployments. Zhang’s team also aims to develop advanced task allocation strategies to enhance the coordination among UAVs and streamline the mapping process.
Moreover, the introduction of predictive modeling and real-time feedback capabilities within the system could dramatically facilitate faster and more accurate reconstruction. By optimizing the factors governing camera angle and image quality during planning, SOAR could yield remarkably high-quality 3D outputs.
The advancements brought by the SOAR UAV system mark a significant leap forward for aerial reconstruction technologies. This innovative and robust framework merges diverse methodologies for environmental exploration and data collection, heralding a new era in numerous fields. The ability of SOAR to adapt dynamically to changing environments and efficiently collect essential data sets it apart as a leading solution for modern 3D reconstruction challenges. As researchers continue to refine this promising technology, the landscape of UAV applications is set to expand dramatically, with the potential to shape industries well into the future.