The trunk of an elephant is not only one of nature’s most magnificent adaptations, but it has also become a focal point of scientific inquiry, blending biology with engineering. With 17 muscles intricately arranged and controlled by approximately 60,000 neurons, the elephant trunk is a masterclass in dexterity. This organ serves myriad functions, from feeding and drinking to social interactions and defense, all stemming from its remarkable ability to twist, stretch, and contract. Researchers now aim to harness the unique biological insights derived from the trunk’s construction and capabilities to innovate in the field of robotics.
Scientific Ingenuity at Work
A groundbreaking study conducted by a collaborative team of engineers and mathematicians from institutions such as Stanford University and the University of Oxford sheds light on how to replicate this biological marvel with dramatically simplified components. They crafted a physical model relying on just three actuators, questioning the conventional wisdom in robotic arm design. This endeavor is more than a mere duplication; it represents a philosophical shift in how we look at mimicking nature’s complex structures with minimal material and energy consumption.
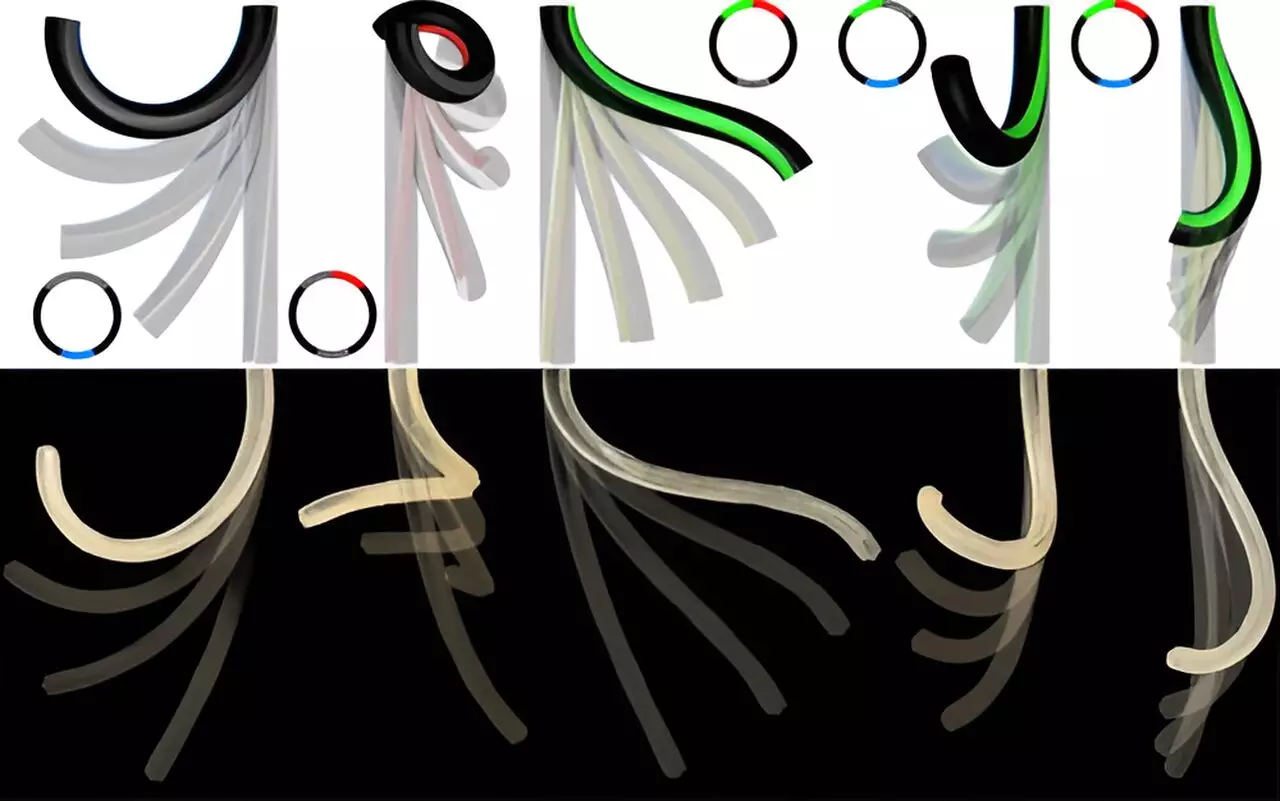
At the heart of the research is not just a theoretical curiosity but a practical application aimed at enhancing robot flexibility and functionality. The team imagined the elephant’s trunk as a slender biological filament capable of motion through the activation of longitudinal, radial, and helical actuator models. This innovative approach allowed them to conceive a model that could navigate and manipulate its environment with an extraordinary degree of freedom, echoing the trunk’s unparalleled versatility in real life.
Blending Mathematics with Material Science
The construction of this model was not limited to theoretical equations; it gave rise to a physical, soft, polymer-based cylindrical design that exemplified the principles being studied. By employing 3D printing technology to fabricate liquid-crystalline elastomer fibers, the researchers created a mechanism where heating caused contraction in a specified direction. This layered complexity allows for movements that mirror the elephant’s trunk, such as bending and twisting, enabling the robot to perform a wide array of actions akin to its natural counterpart, from grasping food to navigating complex obstacles.
In demonstrating the model’s prowess, the researchers conducted an extensive evaluation of its “reachability.” Essentially, this refers to the three-dimensional reach of the trunk, revealing an expansive multi-directional scope. The findings indicated that their model surpassed others which relied on traditional multi-actuator configurations, displaying a remarkable capacity for agile movement in various directions effortlessly, displaying both enhanced reachability and functionality.
Pushing the Boundaries of Robotic Design
Despite its extraordinary potential, the findings bring to light the limitations that accompany such revolutionary designs. While the minimalistic ethos of using only three actuators for a highly diverse range of movements is commendable, it also means the model cannot adapt its length to suit different tasks—a critical feature in many practical applications. The researchers acknowledge the need for further study into the efficiency of load handling, emphasizing that while advancements have been made, the field of robotics must continually evolve to achieve greater adaptability and robustness.
This innovative approach marks a significant advancement over traditional robotic arms typically seen in industrial applications, which often employ a labyrinth of joints and motors that can limit movement efficiency. The elephant trunk model offers a glimpse into a future where robotics could seamlessly navigate and manipulate objects in uncertain environments—elements quintessential for automated tasks from manufacturing to exploration.
Beyond the Elephant: Broader Implications for Robotics
The ripple effect of this research extends far beyond merely replicating an elephant’s trunk; it opens the door to unlocking the physics of soft robotics influenced by the elegant movements of various other organisms. This work lays a foundation for understanding how different biological structures can inform the design of novel robotic systems—not just for performance, but also in terms of sustainability and resource efficiency.
In an era where technological advancement is essential for tackling complex global challenges—from environmental management to healthcare—the marriage of biological inspiration and engineering applications represents a formidable frontier. As this field advances, the implications for the design of robots that can negotiate unpredictable environments will be immense, providing tools that can operate where traditional machinery falters.