In recent years, soft robotics has gained considerable traction due to its ability to seamlessly integrate into environments alongside humans and delicate objects. Central to this field are fabric-based soft pneumatic actuators (FSPAs), innovative devices that utilize air pressure to create movement. Unlike their rigid counterparts, FSPAs are designed to be flexible and adaptable, making them suitable for a wide range of applications from wearable technology to robotic grippers and even adaptive shelters. The core functionality of FSPAs hinges on their ability to inflate and deflate, allowing them to bend, stretch, or twist in response to varying pressures. While the potential for FSPAs is vast, the design and manufacturing processes present significant challenges that researchers are currently working to overcome.
Creating effective FSPAs poses multiple challenges, primarily associated with material selection and control of deformation. Traditional pneumatic actuators often rely on isotropic materials that exhibit uniform properties, which can limit their functional capabilities. Designers frequently engage in a tedious trial-and-error process to identify materials that provide the desired movements, which can result in inefficiencies and extended development timelines. This is where innovative research, such as the recent study conducted by a team from Toyota Central R&D Labs in Japan and Toyota Motor Engineering & Manufacturing North America, steps in.
The research team, consisting of Dr. Masato Tanaka, Dr. Tsuyoshi Nomura, and Dr. Yuyang Song, approached the challenge by exploring Alan Turing’s theory of morphogenesis, which explains how complex patterns can emerge from simple substances through reaction-diffusion processes. Inspired by Turing’s findings, the researchers developed methods to integrate these patterns into the design of FSPAs. According to Dr. Tanaka, the goal was to create pneumatic actuators that could perform intricate movements without relying on specialized materials or extensive technological infrastructure. By leveraging Turing patterns, the team aimed to optimize the surface design of the actuator membranes, thereby enhancing their performance.
The crux of the innovation lies in adopting a gradient-based orientation optimization technique. This method enables researchers to manipulate how the fibers in the fabric are arranged, allowing for custom deformation characteristics. By employing mathematical modeling based on anisotropic reaction-diffusion systems, the team was able to generate specific patterns that dictate the actuator’s movement. Unlike traditional designs, which often resulted in uniform advance patterns, the Turing patterns introduce variability in stiffness across the surface, allowing for precise control over the actuator’s responses to pressure.
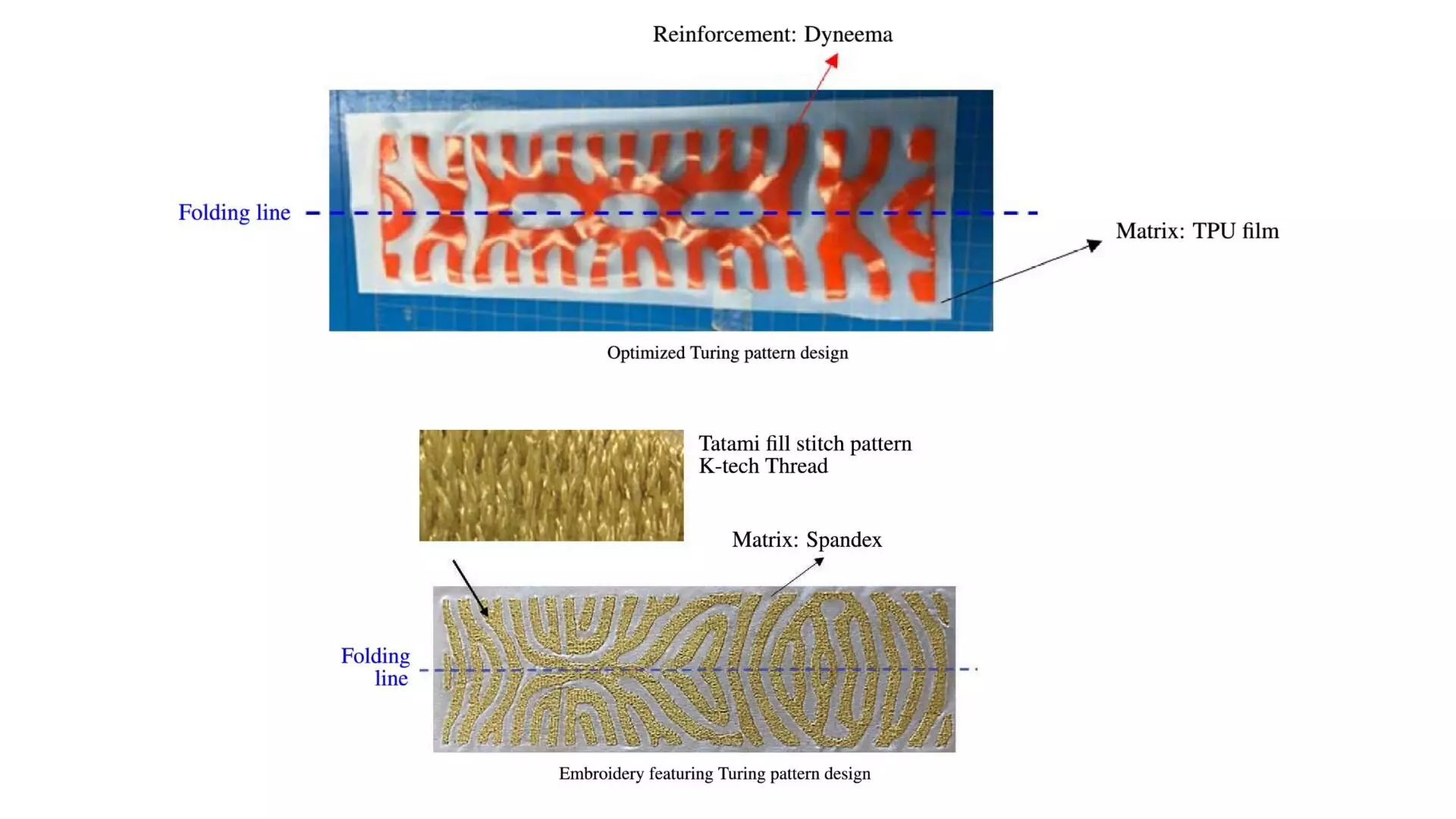
The research team implemented two distinct fabrication methods: heat bonding and embroidery. The heat bonding process involves cutting a rigid fabric into the desired pattern and fusing it to a softer material using a heat press. In contrast, embroidery techniques create regions of varying stiffness within the actuator by embedding the Turing pattern into the soft fabric using stiff threads. Both methods have shown promise in producing scalable and cost-effective FSPAs.
Initial comparisons between the Turing pattern-based designs and traditional pneumatic structures highlighted clear advantages. For instance, in C-shaped configurations, the new designs were able to reduce the distance between actuator edges by approximately 10%. Moreover, the research concluded that the adaptability of the Turing patterns allowed for improved performance even in conventional movements. This effectiveness indicates that these novel actuators could pave the way for broad applications in various environments, potentially transforming the landscape of soft robotics.
Looking ahead, the researchers envision further advancements in actuator design, particularly by integrating cutting-edge materials such as shape memory alloys and electroactive polymers. These technologies hold the potential to enhance the dynamic response of FSPAs, creating even more sophisticated soft robotic systems. Additionally, future studies may focus on refining the fabrication techniques to facilitate mass production and address the needs of larger-scale applications, possibly utilizing 3D printing technologies to achieve unparalleled precision and efficiency.
The research into incorporating Turing patterns into the design and fabrication of FSPAs marks a significant leap forward in soft robotics. By overcoming traditional limitations in actuator design, this innovative approach offers a promising future for flexible, adaptable devices that can safely interact with humans and their surroundings. As researchers continue to refine these methodologies, the resulting advancements could lead to the widespread adoption of FSPAs in sectors ranging from healthcare and personal assistance to advanced manufacturing, thereby broadening the horizons of robotic capabilities.