The ability to deftly maneuver through complex environments is a hallmark of human intelligence, one that allows us to seamlessly navigate around obstacles—be it a stack of books or decorative artifacts. For robots, however, replicating this fluid, adaptive behavior has proven to be a formidable challenge. This complexity arises from the intricacies involved in “motion planning,” which demands a robotic system to not only identify the target object but also to strategically calculate a path that circumvents potential hindrances. Traditional robotics have largely been stymied by this challenge, necessitating substantial computational resources and time to anticipate and react to various obstacles.
Researchers at Carnegie Mellon University’s Robotics Institute (RI) have embarked on a groundbreaking project known as Neural Motion Planning aimed at streamlining this process. This innovative method leverages the principles of artificial intelligence to replicate the way humans learn to interact with their environment. This research endeavors to create a single AI system capable of motion planning across diverse and unpredictable household contexts, including cabinets, dishwashers, and other furnishings one might encounter in a typical home.
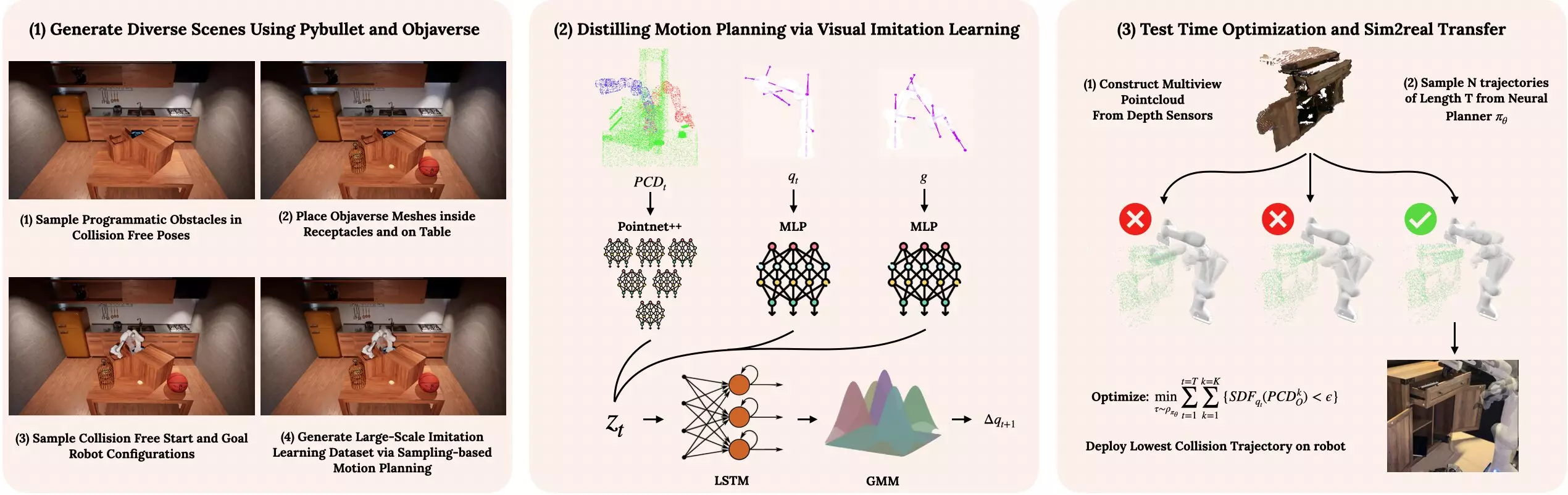
Neural Motion Planning diverges from conventional approaches by prioritizing a data-driven model that emulates human learning. Rather than relying on extensive collision-check algorithms that historically inhibited robot efficiency, this new framework enables robots to learn from vast simulations of intricate environments. Murtaza Dalal, a doctoral student at RI, emphasizes the importance of equipping robots to operate within “unstructured or unknown settings,” where traditional motion planning strategies might falter. As robots engage with such environments, their capacity for rapid and intelligent decision-making begins to resemble human cognition.
The inspiration behind Neural Motion Planning lies in the ways people hone their skills: initial uncertainty gives way to improved proficiency through exposure and practice. Researchers have undertaken the task of simulating millions of diverse scenarios with household items, and these dynamic environments commonly feature hurdles that require improvisational movement, such as navigating around inadvertently placed objects, be they a playful animal or delicate décor.
The impressive capabilities of Neural Motion Planning are largely attributable to its extensive simulation base, where the models are meticulously trained. During these trials, the robotic systems learn to engage in reactive and swift motion planning, gradually developing a robust framework that allows for adaptability within settings they may have not seen before. Deepak Pathak, an assistant professor at RI, heralds this advancement as a pivotal move towards creating more generalized robotic systems—comparable to the successes achieved in the realms of vision and language processing.
The crux of this achievement rests in the ability of Neural Motion Planning to operate across varied environments and adapt to numerous scene arrangements. By utilizing a singular, comprehensive policy distilled from countless learning instances, robots are liberated from the limitations of prior knowledge, making it possible for them to tackle novel challenges in real-time contexts with remarkable efficacy.
During practical applications, such as testing with robotic arms, the Neural Motion Planning framework illustrated its impressive prowess. By integrating technology that captures three-dimensional representations of the setting using depth cameras, researchers directed robots from designated starting points to their goals quickly and accurately. The results have been nothing short of exhilarating. Jiahui Yang, a master’s student at RI, observed that the robotic arm adeptly navigated a myriad of household furnishings—including furniture and plants—while performing assigned tasks.
As the field of robotics transitions towards smarter, more versatile systems founded upon data-driven methodologies, Neural Motion Planning represents a significant step towards realizing a future where robots might achieve a level of dexterity and adaptability comparable to that of humans. While the endeavors made through this research set the stage for exciting developments, they also underscore the intricate relationship between robotics and artificial intelligence—a partnership that may redefine how we understand both fields in the coming years.